自律化が進む車載システム:安全性をより高めるために(3/4 ページ)
車載システムの高度化/高機能化が加速している。新しい機能には、ドライバーの注意をそらして事故のリスクを高めてしまうことなく、付加価値だけを提供できるようにすることが求められる。
さまざまなセンサーの連携
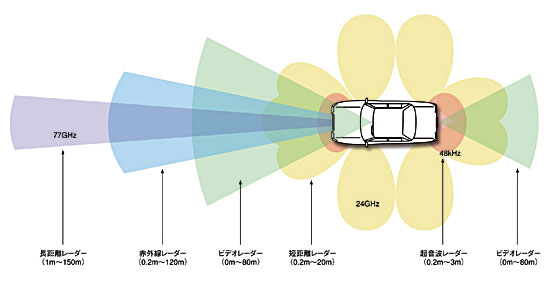
さまざまな危険に対応し、なおかつ推察/動作の精度を高めるために、上述したようなシステムは複数のセンサーから情報を受け取る。ただし、どのようなセンサーにも強みと弱みがある。従って、種類の異なるセンサーを組み合わせて冗長性のある情報を関連付けることで、より正確な判断を下すことができるようにシステムを構築する必要がある。メーカーはレーダーやライダー(LIDAR:光を用いたレーダー)、赤外線、紫外線、ビデオを使って環境を認識する技術を取り入れようとしている(図3)。これらのセンサーのカバー範囲には重複するところもあるが、それぞれが車の異なる部分で独自の強みを発揮する。
一部の自動車メーカーは、車にカメラを搭載している。そのカメラは、車の外側だけでなく内側にも向けられている。外向きのカメラによって外向きのセンサーを補完することで、システムは物体を検知するだけでなく、物体の動作も予測できるようになる。一方、内向きのカメラは搭乗者の体格、座席上の位置、そぶり、顔の表情といった情報をシステムに提供する。内向きのカメラは、スマートエアバッグの作動などの機能をサポートしたり、ドライバーの眠気や酔いを検知したりするために使用される。
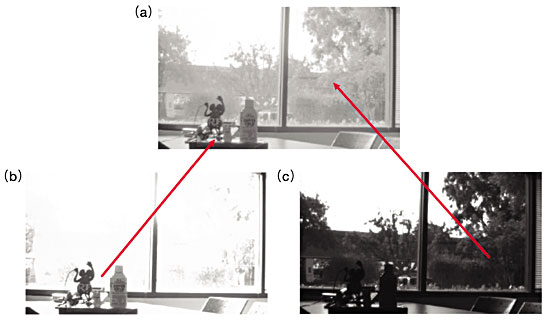
カメラセンサーの性能は向上し続けている。例えば、HDR(high dynamic range)に対応しているセンサーであれば、通常のリニアセンサーよりも幅広い光条件の下で、より鮮明な画像情報を収集することができる。すなわち、HDR対応センサーを車に搭載すれば、明るい環境でも暗い環境でもシステムを機能させることが可能になる。リニアセンサーと比べると、HDRセンサーは明るい環境では白っぽくかき消されてしまうものでも検知することができる。それと同時に、暗い環境で見落とす情報もより少ない。つまり、HDRセンサーは、同じ場所において暗い部分と明るい部分があるような状況で有効である(図4)。
それ以外に、車の状態を監視するセンサーからの情報も収集する必要がある。そうしたセンサーとしては、ジャイロスコープ、加速度計、ハンドル/ブレーキペダル位置の検出器、タイヤの回転速度を計測するシステムなどがある。また、GPS(global positioning system)などの位置情報システムとデジタル地図を組み合わせることで取得可能な情報もある。さらに、道路に埋め込まれているデバイスから、車に対して局所的なリアルタイム情報をワイヤレスで送ることも可能だ。
さまざまなセンサーを組み合わせ、取得した情報を関連付けることで、「データの連携」が実現される。それにより、自動車の電子システムは車両付近の物体に対する位置や経路を特定できる。ただし、複数種のセンサーからデータを収集しなければならないので、システムのリアルタイム処理性能を高める必要がある。加えて、車内でデータを転送するために、ネットワーク環境が必要となる(別掲記事「車内ネットワークのプロトコル」を参照)。
車内ネットワークを用いてコンポーネントの数を減らすことで、車のコストと重量を減らすことができる。加えて、冗長なセンサーを削減することが可能だ。例えば、エアバッグとシャーシシステムは、車の安定性を保ったり、横転/衝撃を検知したりするためにジャイロを共有する。また、センサーの取り付けが難しいところでは仮想センサーで代用することも可能だ。仮想センサーの用途としては、それ以外にも、タイヤの空気圧や摩擦の測定、路面の種類の特定といったことが考えられる。
車内ネットワークのプロトコル
ここでは、車内ネットワークに用いられる主なプロトコルについて簡単に説明しておく。
代表的なプロトコル
LIN(local interconnect network)は、幅広く利用されている車内ネットワーク用プロトコルである。このプロトコルはユーザーモジュール間の通信を最適化するもので、20kビット/秒の低速通信で対応可能な用途に使用できる。例えば、座席やミラー、パワーウィンドウの調整などに用いられる。
MOST(media oriented systems transport)もまた、代表的な車内通信プロトコルの1つである。これはD2B(domestic digital bus)の後継となるもので、マルチメディアアプリケーションをターゲットにしている。
もう1つの代表的なプロトコルとして、CAN(controller area network)が挙げられる。これは、エンジンコントローラ、パワートレイン、エミッションコントローラなどのさまざまな電子サブシステムとの通信に使用されているイベント駆動型のプロトコルだ。CANを利用する場合、低コストの市販コンポーネントの使用が可能である。また、条件の悪い環境下でもリアルタイム通信が行えるという特徴がある。
CANでは、優先度の高いメッセージを先に送信することで、競合が発生した際のバスの利用効率を最大限に高めることができる。CANの最大通信速度は約1Mビット/秒と高いが、レスポンス時間がバスの利用効率を下げる要因となる。最も優先度が高いメッセージの最大遅延時間は約150msである。設計の初期段階で、設計者がメッセージに数値を割り当てて優先度を決めれば、メッセージの識別子にその値が保持される。この数値が低いほど、優先度は高いことになる。
新たなプロトコルFlexRay
FlexRayコンソーシアムは、2000年からFlexRayと呼ばれる車内通信プロトコルの開発に取り組んでいる。これは時間駆動型のプロトコルであり、安全性、信頼性、快適性を向上させるための車載用高速制御アプリケーションをターゲットとしている。
FlexRayは、CANよりも高い通信速度を必要とするアプリケーションで利用される。あるいは、複数のCANバスが同時に使用されるような状況で、CANの代わりに使えるものとして位置づけられている。つまりは、車内で複数のネットワークを接続する目的にも適している。
FlexRayは2つの通信チャンネルをサポートしている。各チャンネルの通信速度は10Mビット/秒だ。同プロトコルは、同期型のアクセス方式を採用しており、遅延時間が一定の範囲内に納まるようにメッセージを処理する。また、個々のメッセージを任意に冗長送信できるため、ネットワークの信頼性とネットワーク帯域幅の利用効率が向上する。
FlexRayでは、静的または動的に帯域幅を割り当てることができる。そのため、システムの可用性を高めたりスループットを最適化したりといったことが柔軟に行える。このアプローチにより、設計者はノードごとにソフトウエアを改変することなくシステムを拡張することができる。FlexRayはネットワークへの接続形態として、バス型、パッシブ/アクティブスター型などのトポロジをサポートする。それ以外にも、通信サイクルやメッセージ長といった数多くのパラメータの設定が行えるようになっている。
CANからFlexRayへの移行に当たっては、すべての関係者を巻き込む必要がある。イベント駆動型から時間駆動型への移行は、車載通信技術における大きな変化であるからだ。例えば、FlexRayではネットワークシステムの起動時が最も複雑な動作フェーズとなる。FlexRayは、フォルトトレラントな同期クロックスキームに基づいており、起動時には一定時間で同期をとるためのタイムベースを設定するマスターが存在しない。従って、ユーザーは別の方法でタイムベースを確立する必要がある。こうしたことから、FlexRayの普及にはまだ時間がかかるだろう。
脚注
※1…Traffic Safety Facts 2004 Data, Department of Transportation HS 809 911, NHTSA's National Center for Statistics and Analysis, www-nrd.nhtsa.dot.gov/pdf/nrd-30/ncsa/TSF2004/809911.pdf.
Copyright © ITmedia, Inc. All Rights Reserved.