「事故ゼロ」に向けた自動車安全技術の最先端:Automotive Electronics Forum 2007
本誌主催『Automotive Electronics Forum 2007』では、『日欧自動車安全技術開発の最前線』をテーマに、欧州連合(EU)の開発プロジェクト「SPARC」、「EASIS」の成果や、日産自動車の運転支援技術など、最新の自動車安全技術についての講演が行われた。
自動車におけるエレクトロニクス技術応用の代表として語られるのが安全技術である。各種センサー、レーダーを利用した安全システムの導入はすでに始まっているが、今後も「事故低減」から「事故ゼロ」に向けて、自動車メーカー、電装品メーカーにおける安全技術開発への比重が高まっていくことは確実だ。
2007年12月12日、東京コンファレンスセンター・品川において開催された本誌主催『Automotive Electronics Forum 2007(以下、Automotiveフォーラム)』では、『日欧自動車安全技術開発の最前線』をテーマに、欧州連合(EU)の開発プロジェクト「SPARC」、「EASIS」の成果や、日産自動車(以下、日産)の運転支援技術など、最新の自動車安全技術についての講演が行われた。
最先端のx-by-wire技術

基調講演では、ドイツDaimler社トラックプロダクトエンジニアリング部システムアプリケーション担当シニアマネジャのArmin A Sulzmann氏(写真1)が、プロジェクトマネジャを担当したSPARCの開発成果の詳細を紹介した。
SPARCは、Secure Propulsion using Advanced Redundant Controlの略である。自動車の基本動作である「走る」、「曲がる」、「止まる」を従来の機械的制御から電子制御に置き換える「x-by-wire」技術の実現を中核にしたプロジェクトだ。マネジメントを行ったDaimler社を含めて欧州の自動車関連メーカー25社が参加し、大型トラックからコンパクトカーにまで適用できるような技術開発を目指して、2004年から約3年半かけて実施された。
Sulzmann氏は「欧州における年間約6万件の死亡事故のうち、95〜97%は人為的な誤りによるもの。EUでは、2010年までに2002年のレベルの半分にまで事故件数を減らすことを目的とし、SPARCなどの安全技術開発プロジェクトを立ち上げた」とその背景を説明する。
SPARCのアーキテクチャでは、以下の3つの段階で処理が行われる。
■コマンドレベル:カメラ、レーダー、GPS(global positioning system)センサーなどを活用した運転支援システム「ADAS(advanced driver assistant system)」が取得した情報とドライバーの操作情報を比較する
■協調レベル:コマンドレベルで得られた比較結果を基に、最適なセキュアモーションベクトルを算出する
■実行レベル:x-by-wire技術により、協調レベルで算出したセキュアモーションベクトルに沿った運転を実現する
x-by-wire技術では、従来の円形のハンドルの代わりにスウェーデンSKF社のモジュールを使った2本のスティックで運転する「steer-by-wire」、ドイツSiemens VDO社のくさび状ブレーキパッドを使用する「EWB(electronic wedge blake)」による「blake-by-wire」を実現しており、操作性、制動能力を大幅に向上できたとしている。
Sulzmann氏は「SPARCの成果は、自動車安全技術の青写真として今後10年間でSPARCメンバーを中心に浸透していくだろう」とまとめた。その上で、数十年後の未来における開発課題として、行き先を指定するだけで、運転操作をしなくても安全を確保しつつ自律的に目的地にたどり着く機能を挙げ、チューリッヒ工科大学が開発した試作車を紹介した。
安全システムの統合運用

2つ目の基調講演では、イタリアCentro Ricerche Fiat社(Fiat社の研究開発部門。以下、Fiat社)ハードウエア設計開発部シニア研究員のMichele Sciolla氏(写真2)が、EU内でSPARCと並行して行われた自動車安全技術開発プロジェクト「EASIS」における耐故障(fault tolerant)ユニットの開発成果について解説した。
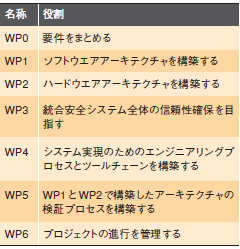
EASISは、Electronic Architecture and System Engineering for Integrated Safetyの略で、現時点ではほぼ個別で運用されている複数の安全システムを統合運用するためのアーキテクチャやプラットフォームを、ソフトウエアとハードウエア両面から構築することを目的としている。欧州の自動車関連メーカー22社が参加して、2004年から2007年秋までの期間で実施された。プロジェクトは表1に示した7つのWP(work package)に分かれている。Fiat社のSciolla氏は、WP2でハードウエア設計を担当した。
Sciolla氏は、Automotiveフォーラムにおいて、FlexRayを使った耐故障ユニットについて説明した。これは、車線維持と速度制御を担う安全システム、路車間の協調を実現するテレマティクスリンクシステム、これらの安全システムからの情報を運転操作に反映するsteer-by-wireシステムを、1台の自動車内で統合運用しているテストベンチの動作を検証するために開発したものだ。具体的には、ステアリングをフィードバック制御するためのECU(electronic control unit:電子制御ユニット)を2重化して並行動作させており、片方が故障してももう一方のECUが動作し続けることで耐故障性を保証する。「この場合、故障した側のECUがフェールサイレント(fail silent:故障時に何も信号を送らない)でなければならない。故障をさまざまなチェック方法で検知することで、フェールサイレントを確保する仕組み作りが重要だ」(Sciolla氏)という。
2030年までに「事故ゼロ」を目指す

日産で技術開発本部IT&ITS開発部の部長を務める豊増俊一氏(写真3)は、「最新IT/ITS技術がもたらすドライバー運転支援システムの革新」と題した講演を行った。「クルマが人を守る」という日産のセーフティシールドコンセプトに基づいて開発され、最新の自動車に装備されたドライバー運転支援システムや、交通事故ゼロに向けた同社の安全への取り組みなどを紹介した。
豊増氏は、品質とコストをベースに置きながら、日産が今後取り組む技術開発領域として、「安全」、「環境」、「ライフオンボード」および「ダイナミックパフォーマンス」の4つを挙げた。これらのうち、Automotiveフォーラムでは、安全についての具体的な取り組みを紹介した。
日産は2030年までに交通事故ゼロを目指す安全目標「Vision Zero」を実現するために、「クルマ」、「人」、「社会・交通」の3つの要素で革新を図る「トリプルレイヤードアプローチ」を推進している。まず、豊増氏はクルマにおける革新の事例として、2007年末までに実用化した以下の3つの技術をビデオ映像も交えながら紹介した。
■ディスタンスコントロールアシスト(DCA):前方の車との車間距離を検知して危険を回避するための動作を行う
■レーンディパーチャプリベンション(LDP):走行レーンの逸脱を検知してドライバーに危険を知らせる
■アラウンドビューモニター(AVM):車の全周をふかん映像としてディスプレイに表示することで、駐車時の死角をなくす
続いて、人、社会・交通における革新の事例としては、神奈川県横浜市を中心に実施している大規模ITS(intelligent transport systems)実証実験「SKYプロジェクト」を取り上げた。このシステムでは、交差点などで道路脇に設置した車両検知機が脇道から出てくる車を検知し、交差する道路を走行している車にその情報を伝えて注意を喚起する。これによって出会い頭の事故を未然に防止しようというもの。実証実験では、注意を喚起することによって約9割の人が減速するなど、運転行動に変化があったという結果が出ている。
これ以外にも、豊増氏は最新のIT(information technology)技術とITS技術が融合することによって、さらなる安全性の向上が可能となることを示唆した。一例として、携帯型GPS機器を持った歩行者の位置情報や、道路が凍結して車がスリップしやすい場所の情報などを情報センターなどに集め、その近くを走行中の車に関連する情報をその情報センターからリアルタイムで知らせることができるシステムを挙げた。このシステムによって、運転中のドライバーは車に近づいてくる危険因子を事前に認識することが可能となる。同氏は、「これらの開発や実証実験に、行政や地域住民、企業が一体となって取り組むことが重要だ」として講演を締めくくった。
(朴 尚洙、馬本 隆綱)
Copyright © ITmedia, Inc. All Rights Reserved.