Bluetooth 5.1で追加された「方向検知機能」を知ろう:Bluetooth位置情報サービスの種類と市場を知ろう(後編)(2/3 ページ)
前編では、Bluetooth位置情報サービスの具体的な活用法について区分に分けて紹介しました。後編では、より高精度な位置情報サービスの実現を目指し、Bluetoothコア仕様バージョン5.1(Bluetooth 5.1)に追加された、方向検知機能について解説します。
方向検知の原理
単純化のために、2つのアンテナを持つアンテナアレイでAoAを実現する事を想定します。ある角度θで入射してきた電波は、それぞれのアンテナでは異なる位相で受信します。下図の例の場合、アンテナ1とアンテナ2では、アンテナ1の方が伝搬距離が長い分、位相差φが生じます。
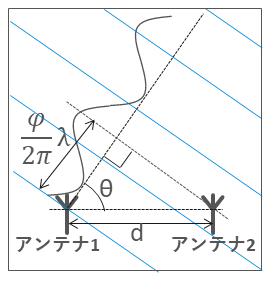
アンテナ間の距離dと電波の波長λは決まっているので、角度は下記数式の関係になり、入射角θが計算できます。
Bluetooth LE無線デバイスでは、通信用モデムに位相を検知する仕組みが備わっています。その仕組みでは、三角関数の定理を用いIQデータを取得します。Iは同相(cos)成分、Qは直交(sin)成分として、それぞれの成分の強度が分かると下記の計算より位相差φが分かります。
下図では、Silicon LabsのBluetooth対応デバイス「EFR32BG21」のデータシートからRF部分のブロックダイアグラムを切り出しています。

このI信号とQ信号を得るための仕組みが、チップ内部に備わっていることが分かります。ここでIQデータを取得することで、位相差情報を取得して方位を計算することができます。AoAでは、それぞれのアンテナを切り替えてアンテナごとの位相差を、AoDでは送出されたアンテナパターンとタイミング情報をもとに受信した信号からタイミングを切り出して位相差の計算を行います。実際はアンテナアレイ上の複数アンテナに対し同様の演算を行う事で精度を向上させます。
Copyright © ITmedia, Inc. All Rights Reserved.