動くモノのインターネット(IoMT)を推進する高性能慣性センサー:アナログ回路設計講座(17)
動くモノのインターネット(IoMT、Internet of Moving Things)の実現の鍵は、センサー・ノードの正確なモーション・キャプチャと位置追跡です。そこで重要になるのが慣性センサーです。IoMTのための慣性センサーに求められる要件を見ていきながら、IoMTに最適な高性能慣性センサーを紹介しましょう。
急速に数を増している、高品質のセンサー、信頼性の高いネットワーク接続、そしてデータ分析手法が結び付いて、産業界の新たな効率向上がもたらされるにつれ、これと並行して、これらのインテリジェント・ノードをさらに自律的でモバイル性を持つものとすることからメリットが生じます。この場合、センサー・ノードの正確なモーション・キャプチャと位置追跡がアプリケーション成功の鍵となります。これにより、スマート・ファームでは、自律的な車両と飛行体を連携して利用し、地理位置情報センサーの豊富な内容と分析学習に基づいて、より効果的に耕作の方向性を示すことができます。スマート手術室では、センサー・フュージョンが組み込まれたロボット・アームを正確に誘導するために、従来からあるナビゲーション技術を手術台に適用して、あらゆる条件下で正確な誘導を行えるようにしています。さまざまな分野で、モーションベースのセンサーによって移動体関連アプリケーションの価値が大きく向上しています。
携帯電話によってコンスーマ向け慣性センサーが普及しましたが、その精度に関する評価はそれほど高いものではなく、これまでのところ、動くモノのインターネット(IoMT)の概念の推進には役立っていません。しかし、新世代の高性能工業用センサーは、1度未満の指向精度の実現と地理位置情報に基づく正確な位置特定が可能で、必要とされるサイズおよびコスト面の効率も備えており、IoMTを促進させることのできる条件を備えています。
工業用システムにおけるインテリジェント・センシングの原動力
工業用の機械やプロセスの進歩に関し、最も価値があるのは、システムレベルで明確な利点があることです。これには通常、設計上および実装上の課題が伴いますが、それらの課題は、新しいソリューションによるアプローチとビジネス・モデルを生み出します。このようなシステムレベルでのアプローチの牽引役となるのが、高いリソース効率、高精度、安全性向上の3つです。これらの改善点に着目したアプリケーションはさまざまな業界に広がり、陸海空、屋内/屋外、長期/短期、機械/人間などの広い分野に及んでいますが、このような業界や分野に関わらず、これらのアプリケーションが依存する属性は共通しています。具体的には、精度、信頼性、安全性、そしてインテリジェント機能を用いた処理と分析です。その概要を表1にまとめます。
さまざまなタイプのセンサーが、特定目的用アプリケーションの設計タスクの鍵となります。対象とする設計がシステム的に複雑な場合は、センサーの品質と、さまざまに変化する条件下での信頼性を慎重に検討する必要があります。業界によっては利便性を主眼にセンサーを選ぶことも可能ですが(例えば、携帯電話に組み込まれている一連のセンサーを利用する)、ある業界では、全くゼロの状態からセンサー・スイートを決定し、意図したシステム状態を高い信頼性で完全に実現できるように、センサーを精度に基づいて選択し、インテリジェントに組み合わせることが求められます。
スマート・センシング
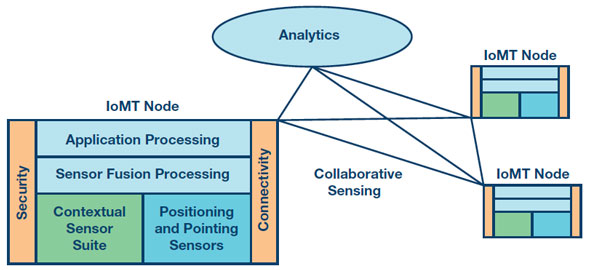
センサーを豊富に使用できるようになったことで、インテリジェント性とネットワークへのアクセス性を備えたこれらのシステムは、成熟産業であるはずの分野に大きな変化をもたらしており、農業をスマート農業に、インフラストラクチャをスマート・インフラストラクチャに、都市をスマート都市に変えつつあります。これらの環境において、関連するコンテキスト情報を収集するために各種センサーが使用されるのに伴い、データベース管理と通信に新たな複雑さが生じ、図1に示すように、センサー間だけではなく、各種プラットフォーム間や時間的な面でも高度な融合が求められるようになりました(例えば、インフラストラクチャの経時的状態、前年の穀物産出高、あるいは交通の状態やパターンなどのクラウドベース分析)。

装置や環境から、どの情報を高い信頼性で取り出すことができるかという問題を解決することが、これらの新しいベンチャーの最終的な有効性と成長を決定づける主な目安となります。精度は効率を高め、経済的側面から結果を生み出し、同時に、安全かつ信頼できる動作の中心となるものです。最も基本的なセンサーでも簡単な機能は追加できますが、このような最小限の付加価値では、ここで取り上げているIoMTアプリケーションには不十分です。これらのIoMTアプリケーションでは、イエス/ノー、アップ/ダウン、オン/オフなどの単純な切り替えがきわめて細かい対応に置き換えられます。また、機能の追加はセンサーの選択に影響を与えます。
動作が問題となる場合
IoTにはほとんどの場合、動作が伴います。そうでない場合でも(例えば工業用の固定セキュリティ・カメラ)、正確なポインティングが不可欠であったり、望ましくない動作(不正改ざん)に関する知識が重要になったりすることがあります。光学機器を搭載したドローンで撮影した作物の画像を利用する場合、安定した飛行条件下で正確なポインティング角度を維持できれば、より良い結果を迅速に得ることができます。また、光学データの地理的位置を正確に特定できれば、データの履歴や傾向を比較することも可能です。スマート機能を備えた移動体は、陸海空の別を問わず、ますます GPS 誘導に依存するようになっています。しかし、人為的なものであれ自然によるものであれ(ビル、樹木、トンネルなど)、GPSの信頼性を損なう要素も増加しています。精度の高いものを選択すれば、センサーを追加することによって、GPSの情報が途切れている間も自律的なナビゲーションを行うことができます。IoMTに「M」(動き)を加える項目の例と、それらの動作とアプリケーションが持つ有効性の関連を表2に示します。
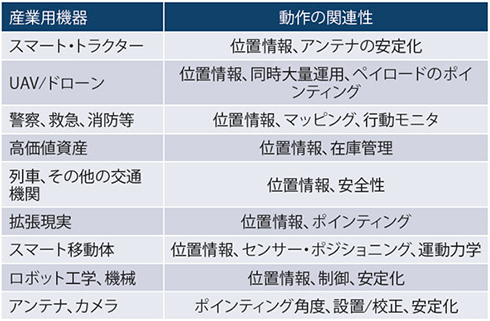
装置や人物の自然な慣性を取り込むための機会と手段が与えられていて、それを使用可能なコンテキスト情報と融合させることができる場合、抽出したシステム状態に関する情報の重要性は、より高くなります。これを表3に示します。

信頼性が高く安全な IoMT ノード
IoMTノードの出力の有効性と価値は、主にコア・センサーの品質と、それらのセンサーがアプリケーションのコンテキストを高い再現性で取り込むことができるかどうかに依存しています。さらに、継続的なセンサー補正/特性向上を実現し、センサー間の状態の動的関係(例えば、ある時点においてどのセンサーが最も高い信頼性を備えているか)を理想的なものとするために、融合処理が必要です。アプリケーション・レベルの処理はソリューションの内部に階層化され、境界条件を含めて、特定の環境に合わせて最適化されます。場合によっては、これらのノードは、地上や空中における無人移動体を同時に大量運用する場合のように、自律的であっても、互いに連携して機能します。このような場合、図2に示すように、信頼性の高い送信と固体識別の確保に重点を置いた、安全な通信リンクが展開されます。
自律性の中核となるセンサー
人間の体と同じように、自律的なIoMTノードは複数のセンサー入力に基づいて、必要な状況認識を行って個別に対応し、無作為的で無秩序でさえある事象に対してその結果を最適化し、最終的には時間をかけてそれを改善していきます。表4に示すように、基本的な計測から制御機能を持つ計測への移行、さらには自律性を備えた計測への移行には、センサーの結合レベルや、組み込みインテリジェント機能をさらに向上させることが求められます。これらのノードは高度なネットワーク接続機能と適応学習機能も実行するので、より人間に近い機械へと向かう傾向にあります。

インフラストラクチャ不要の位置特定
衛星通信がブロックされたり使用できなくなったりしなければ、GPSはどこでも利用することができます。電波が届くのであれば、無線距離測定技術は高い精度を実現できます。また、妨害がなければ、磁場は常に測定できます。慣性は、他とは異なり、周囲の条件に左右されずに測定できます。慣性MEMSセンサーに固有の誤差(ドリフト)があることははっきりしていますが、これらは補正可能で、新世代の工業用慣性計測ユニット(IMU)は、コスト効果の高い小型のパッケージにもかかわらず、かつてない安定性を備えています。
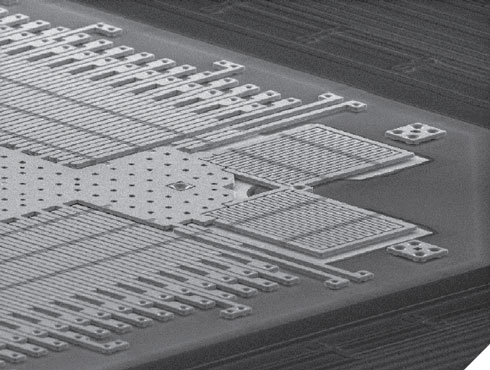
図3に示すように、慣性MEMSデバイスは、標準的な半導体プロセスと高度なパッケージ技術、そして集積化アプローチを活用し、デバイスの動きを直接検出して計測し、通常は直線加速度(g)または角度回転(°/sec、つまり速度)でその動作を解釈します。最も単純な部類に属するアプリケーションを除き、すべてのアプリケーションは多自由度と呼ばれるもので(基本的に動作はどの軸にも発生する可能性があり、装置がその動作に関して制約を受けることは比較的少ない)、gおよび速度の計測は、x、y、zの各軸(ロール軸、ピッチ軸、ヨー軸と呼ばれることもある)について行う必要があります。これらをまとめて、6自由度の慣性計測ユニットと呼ぶことがあります。
MEMSの設計者は経済性を求めて、各軸(x、y、z)におけるこれら複数種類の検出結果(g、速度)を得るのに必要な半導体面積を、当然ながらできるだけ小さくしようとします。その一方で、より厳しい工業用センシング・プロファイルを満たすには、バランスをより慎重に考慮した設計的視点によって性能を向上させる必要があります。実際に、1つのMEMS部分で6つのモードすべての計測を試みるMEMS構造も存在します。高性能センシングの実現に向けたこれらのアプローチの有効性を検討する前に、検出のためにMEMSデバイスが必要となるような動作がある一方で、そのデバイスが、誤差を発生させるおそれのある他の形態の動作を排除する(あるいはその影響を受けないようにする)能力を備えていることも同様に重要である点を理解することが大切です。例えば、ジャイロ・センサーは角速度を計測しますが、その角速度計測が加速度や重力の影響を受けない能力も必要です。1つの小さな構造であらゆるデータを計測しようとする単純なMEMSデバイスは、本来(設計上)、このような他の好ましくない誤差源の影響を非常に受けやすく、必要な動作と不要な動作を区別できません。これは最終的に、ナビゲーション・アプリケーションやポインティング・アプリケーションにおけるノイズや誤差となって現れます。
IoMTが、期待される有用なリソース効率、安全性の向上、あるいは高い精度を必要に応じて提供するには、今日のモバイル・デバイスに使われて広く普及しているシンプルなセンサーよりも高いレベルの精度が必要になります。性能を追求する設計は、それぞれの検出モードと検出軸を個別に設計することにつながりますが、同時に融合と統合へ向けた視点も必要です。最後に、性能を追求した設計は、必ずしもコスト効果を犠牲にするものではないことを認識することが重要です。
機能か性能か
アプリケーションによっては機能の追加が重視されることがありますが(モード切り替えのためのデバイスの挙動/方向)、これはシンプルなMEMSデバイスによって比較的容易に実現することができます。汎用デバイスには数度の誤差があるのに対して、工業用デバイスや業務用デバイスは、誤差が1度未満に抑えられていたり位置精度が1桁以上高かったりすることから、値の計測に使われる傾向が強い一方で、強い振動を受けるような環境で使われることもあります。ローエンド・センサーとハイエンド・センサーの性能差は小さいものではなく、実際、コンポーネント選択の際には十分慎重に検討する必要があります。
精度のレベルは最終的なアプリケーションによって決まり、その精度レベルを実現できるかどうかは、選択したセンサーの品質によって決まります。表5は2つのソリューション・オプションを対比したもので、センサーの選択が、設計プロセスだけでなく、装置の精度にも大きく影響することがわかります。実際、使われ方が限定的で、そのアプリケーションが誤差を許容できるものである場合は、低精度センサーの方が適していることもあります。
つまり、安全性や生命には重要な影響を及ぼさないアプリケーションや、比較的低精度でも十分なアプリケーションの場合です。ほとんどのコンスーマレベルのセンサーは低ノイズで、それほど厳しくない条件下であれば十分な性能を発揮しますが、振動を含む動的運動を伴う機械装置には適していません。このような装置の場合、低性能の慣性計測ユニットでは、単純な直線方向加速度や傾きをこれらの動的運動と区別して計測することができないからです。1度未満の精度を実現する一方で、工業的環境下でも使用できるようにするには、振動や温度の影響による誤差ドリフトの除去を重視して設計されたセンサーを選択する必要があります。このような高精度のセンサーは、より広い範囲で予想されるアプリケーション状態に、より長い時間範囲にわたって対応することができます。
通常、高精度計測器の設計者は、移動角度や移動距離ではなく、校正されたgと速度を出力する慣性計測ユニット(IMU)を使用したいと考えます。このシステムレベルの情報はアプリケーションによって大きく異なるため、慣性センサー設計者よりもシステム設計者が重視するためです。これによって生じる問題が、例えば、慣性センサーの仕様表からポインティング精度を判断することです。
携帯電話に見られる代表的なコンスーマ・センサーと比較するために、一般的な工業用デバイスの仕様を表6に示します。よりハイエンドな工業用デバイスも使用可能で、これらのデバイスは、さらに1桁高い精度を備えています。ほとんどのローエンド・コンスーマ・デバイスには、直線加速度の影響、振動整流誤差、角度ランダム・ウォークなどのパラメータや、工業用アプリケーションにおいて実際に最大の誤差源となり得るその他のパラメータの仕様が定められていません。

この工業用センサーの例では、比較的高速または大きな動き(2000°/sec、40g)のシナリオで使用するように設計されていますが、このような場合は、最良の信号識別を可能にするための広帯域センサー出力も重要です。性能補正用の大きな相補的センサー・スイートへの依存度を抑えるには、動作時のオフセット・ドリフトをできるだけ小さくする必要があり(動作時安定性)、バックエンド・システムのフィルタリング補正のために必要な時間を確保できないアプリケーションでは、ターンオン・ドリフトを最小限に抑えること(再現性)も不可欠です。g関連のドリフトの識別と補正を助けるためには、ジャイロ・センサーと組み合わせた低ノイズ加速度センサーが使われます。
ジャイロ・センサーは、g関連のあらゆる事象(振動、衝撃、加速、重力)によるデバイス・オフセットへの影響を直接排除できるように設計されており、直線g項に大きな利点を提供します。また、校正により、温度ドリフトとアライメントの両方が補正されています。アライメント補正なしでは、代表的な多軸MEMSデバイスが1つの半導体構造内に組み込まれていたとしても、誤差バジェットの主要因となるポイントに対して、ミスアライメントを発生させる可能性があります。
最近では、ノイズはセンサーのクラスを決める決定的要因要素ではなくなってきたものの、計測対象が単純な動作や比較的静的な動作だけではないアプリケーションでは、直線gの影響やミスアライメントなどのパラメータによりノイズが増加し、半導体の設計手法とデバイス固有の校正のどちらで改善するにしても、コストは非常に高くつきます。
センサー・フュージョンは低品質のセンサーを補えるか
端的に言って「ノー」です。センサー・フュージョンは、環境、運動力学、およびアプリケーションの状態を基準にして、センサーの組み合わせを融合あるいは管理するフィルタリング機能とアルゴリズムです。これは、温度補償のような確定的補正方法を提供し、システム状態に関するデータに基づいて、あるセンサーから別のセンサーへの切り替えを管理します。しかし、そのセンサーが本来持つ欠点を解決するものではありません。
センサー・フュージョンの設計において最も重要なタスクは、まず、残りの設計プロセスを進めるために、アプリケーションの状態を十分に理解することです。所定のアプリケーションに対して適切なセンサーを選択したら、ミッション全体のさまざまな段階におけるその重要度(関連性)を理解するために、詳細な分析を行います。歩行者用の自律ナビゲーションの例では、そのソリューションは主に、性能を追求した設計かどうかではなく、使用できる機器(例えば、スマートフォンに組み込まれたセンサー)によって決まります。この場合はGPSへの依存度が大きく、組み込みの慣性センサーや磁気センサーのような他の使用できるセンサーを加えても、有効な位置情報を決定するというタスクに寄与する度合はわずかです。これは屋外ではかなりうまく機能しますが、課題の多い都市環境や屋内ではGPSは使用できず、使用可能な他のセンサーの品質は高くないので、大きなギャップ(つまり、位置情報品質の不確実性)が残ることになります。通常は、先進的なフィルタとアルゴリズムが採用され、センサーを追加したり、より高品質のセンサーを使用したりすることなくこれらのセンサーを融合しますが、ソフトウェアでは不確実性のギャップを埋めることはほとんどできず、これは最終的に、レポートされた位置の信頼性を大きく低下させます。この概念を図4に示します。

これとは全く逆に、工業分野における自律ナビゲーションのシナリオは性能を主眼に設計され、特定の精度要求に基づいてシステムを定義し、コンポーネントを選択します。他のセンサーよりも品質が大幅に優れた慣性センサーを選べば、それらをプライマリ・センサーとして使用することができます。他のセンサーは、不確実性のギャップを小さくするために慎重に利用します。アルゴリズムは、概念的に、信頼できるセンサー指示値間の位置を外挿/予測するよりも、最適な負荷配分、切り替え、センサー間の相互相関に加え、環境およびリアルタイムの運動力学に重点を置きます。
いずれの場合も、品質が改善されたセンサーにより精度を向上させることができます。また、センサーのフィルタリングとアルゴリズムはソリューションの重要な部分ですが、それ自体が、品質の不十分なセンサーによる対応範囲のギャップを解消するわけではありません。
新しいクラスの工業用センサーは、旧世代の誘導ミサイルに使われていたものとほぼ同等の性能を備えています。図5に示すこうした新世代の工業用センサーは、元々は高い信頼性と精度によりオートモーティブ・アプリケーションに使用することを念頭に置き、経済的に現実的でスケーラブルなプロセスで構築されたセンサー・アーキテクチャを利用しており、性能コスト比においても性能サイズ比においてもきわめて優れています。
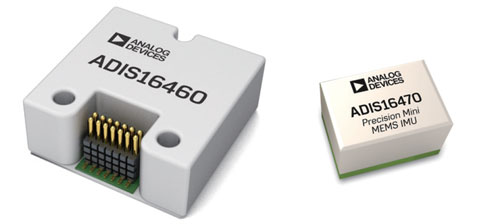
精密なモーション検出はもはや、他に選択肢がなく、通常では容認できないほど高額な追跡ソリューションへの投資を余儀なくされるような、特殊なアプリケーションに分類されるべきものではありません。工業グレードの精度がミニIMUのフォーム・ファクタで実現可能になり、IoT設計者は、IoMTを可能にする組み込みコンテキスト検出と組み合わせた高品質のモーション検出の統合化を通じて、提供する価値を何倍にも高めることができるようになりました。

Copyright © ITmedia, Inc. All Rights Reserved.
提供:アナログ・デバイセズ株式会社
アイティメディア営業企画/制作:EDN Japan 編集部/掲載内容有効期限:2018年5月3日




