- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
ON/OFFコンバーターの制御不安定問題(4)状態平均化法とシミュレーションの結果比較:たった2つの式で始めるDC/DCコンバーターの設計(30)(1/2 ページ)
今回は状態平均化法とシミュレーションの結果を比較し、結果について考察していきます。
前回は昇圧型DC/DCコンバーターの状態平均化法の結果と今回のシミュレーションの結果を比較する予定でしたが説明の都合で紹介できませんでした。
今回は繰り延べにした状態平均化法とシミュレーションの結果を比較し、結果について考察していきます。
1−s特性と1+s特性
前回(第29回)説明したように3種類のDC-DCコンバーターは基本的な伝達関数としてLCに起因する2次遅れ系の周波数特性を持ちます。
さらに昇圧型や反転型などのON/OFF型のコンバーターのδ変動に対する利得の周波数特性は周波数が上昇するにつれて利得が上昇する1次のハイ・ブースト(+20dB/Dec)特性を持つことも紹介しました。
ただし、このON/OFF型のコンバーターのδの位相周波数特性は虚数部が負の(1−s)型ですから 「利得の上昇とともに位相が遅れる」 という周波数特性を示します。
一方、同じハイ・ブースト回路でも位相補償や音質調整回路などに使われる微分回路は(1+s)型の特性を持ち、利得は(1−s)型と同様に周波数とともに上昇しますが、虚数部が正なので位相の周波数特性は進む特性を示します。
このようにON/OFF型コンバーターにおけるδ変動の利得周波数特性は周波数とともに大きくなるのに位相は遅れるという非常に位相補償のしにくい特性になり、設計者を悩すことになります。
特性の確認
具体的計算例
実際に動作確認には具体的な定数が必要です。ここでは連載第28回で取り上げた昇圧コンバーターを用いて次の定数で動作検証を行います。
L=200μH C=100μF δ=0.5 R=50
したがって前回の計算式による伝達関数の各定数は次のようになります。
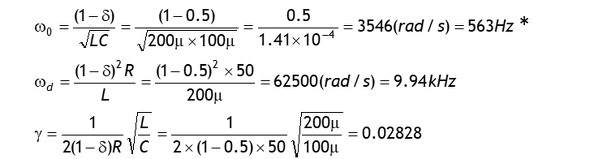
*角周波数ωの単位はrad/sであり、度数法の周波数では回/sです。度数法の1回転は弧度法(Radian系)では、
2π(rad)の回転になるので1Hz(1回転/s)は2π(Rad/s)に相当します。
つまり周波数fを2π倍したものが角周波数ω(=2πf)になります。
ラプラス素子に前述した定数を設定したSPICEの周波数特性を図1に、昇圧コンバーターのδ変動の応答波形から求めた周波数特性(赤)を図2に示します。図1、図2にはコンバーターのVcc変動時の周波数特性(黒)も併記してあります。
図2から、
- δ変動時には高域で−20dB/Decの減衰特性を示します(赤)。Vcc変動時(黒)に対して実機でもハイブースト特性が付加されていることが確認できます。
- 状態平均化法ではVcc変動時の位相(黒)は−180度の遅れにとどまっているのに対してδ変動時(赤)は−180度を超えて遅れます(実動作波形では位相は未解析)。
- ゼロ周波数(ωd)が異なっています。状態平均化法の値6万2500(rad/s)に対して実機ではωd=2万5000〜3万程度です。この差分が生じた原因はよく分かっていません。
- Vcc変動時の伝達関数(黒)は基本特性のー40dB/Decの減衰特性だけです。この特性は状態平均化法と実機はよく合致しています。
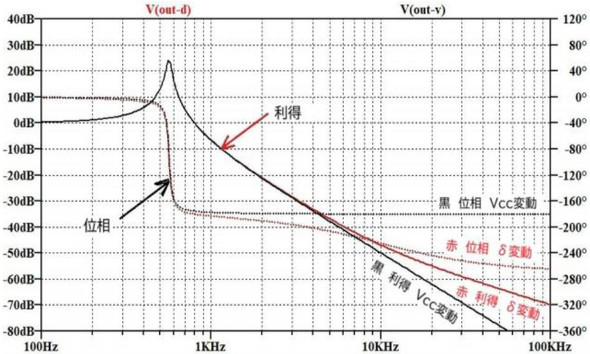 図1:状態平均化法による周波数特性
図1:状態平均化法による周波数特性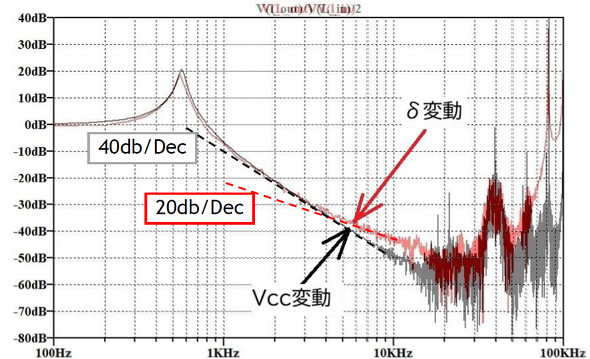 図2:SPICEによる周波数特性
図2:SPICEによる周波数特性 表1に代表的な周波数における両者の値を示します。
Vcc変動時の伝達関数は両者ともよく合致していますがδ変動時の伝達関数には曲線にズレがあるため数dB程度の差が生じています。
| δ変動時周波数特性 | Vcc変動時周波数特性 | |||
| 状態平均化法 | 実機 | 状態平均化法 | 実機 | |
| ω0 | 550Hz | 560Hz | ← | |
| ω0時利得 | +24.5dB | +20dB | ← | |
| 1kHz利得 | −6.6dB | −5dB | ← | |
| 2kHz利得 | −21dB | −21dB | ← | |
| 5kHz利得 | −34dB | −36dB | −36dB | −37dB |
| 10kHz利得 | −47dB | −42dB | −50dB | −50dB |
| 高域減衰特性 | −20dB/Dec | −20dB/Dec | −40dB/Dec | −40dB/Dec |
| 表1:状態平均化法と実動作波形の特性値比較 | ||||
表2にインダクタンスをパラメーターにしてSPICEの応答波形から求めたωd、状態平均化法のωd、そして前々回(第28回)の解析結果を示します。
| L値 | 50μH | 100μH | 200μH |
|---|---|---|---|
| 図2からのωd読み値 | ー | ー | 6〜7kHz |
| 状態平均化法の計算値 | 39.75kHz | 19.88kHz | 9.94kHz |
| 第28回のSPICEの結果 (1−s)の推定振動周波数 |
(τ=40μs) 25KHz |
(τ=80μs) 12.5KHz |
(τ=120μs) 8.3kHz |
| 表2:ωdのインダクタンス依存性 | |||
ハイブーストのクロス周波数ωdは図2から3dBの差分になるポイント取り上げましたが第28回のSPICEの波形では波数が不足しているので精度が悪く、傾向の確認のみでした。またL=200μH時など一定の波数を確保できたケースでは精度の向上も確認できました。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。