- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
ユニットレベルのクロックゲーティングで消費電力が下がる! モジュール方式のSoCインターコネクト:SoCの低消費電力設計ノウハウ(2/4 ページ)
バスとクロスバー:インターコネクトの歴史
インターコネクトファブリックの歴史は、モジュール型NoC設計の考えがどのように生まれ、拡張性の問題をどう解決しているのかを示しています。
SoCはCPUとペリフェラルを搭載したチップであり、開発者はこの2つの要素を結ぶためのインタフェースプロトコル標準を策定しました。さらにバスマスタの出現により、ペリフェラルへの接続が共有されました。バスアクセスの制御には、基板レベルのプロトコルで使用されているようなセントラルアービタが必要でした。
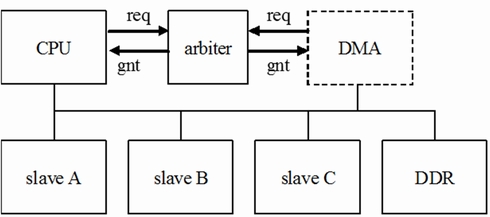 図1 アービタを備えた共有バス
図1 アービタを備えた共有バス時間の経過とともにSoC設計者はIPコアの数をどんどん増やしていきました。設計の複雑さが増すにつれ、必要とされるバスインタフェースの数も増えていきました。このためチップ上の処理量が増大すると、異なるバスマスタが異なるスレーブに対して処理を要求している場合でさえ、バスへのアクセスにかなりの待機時間が発生し得ました。
待機時間による遅延を解消するために、インターコネクト内の複数のマスタとスレーブ間の同時アクセスを可能にするクロスバースイッチが開発されました。以下の論理図は、4つのマスタが4つの異なるスレーブに対して4つの同時トランザクションを実行している様子を示しています。
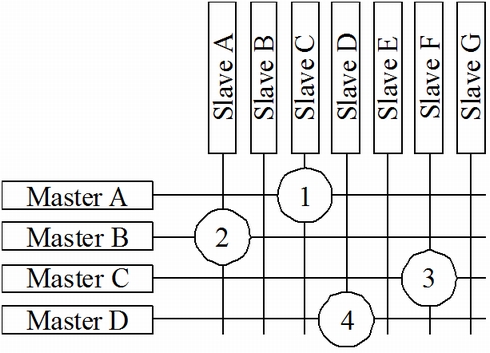 図2:SoC設計におけるクロスバースイッチの論理図
図2:SoC設計におけるクロスバースイッチの論理図物理的に、クロスバースイッチは各スレーブでマルチプレクサとともに実装されます。各マルチプレクサは分散アービトレーション方式でアービタと結合されます。
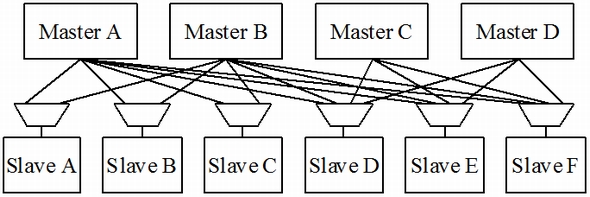 図3:マスタ×4、スレーブ×6のクロスバーの実装
図3:マスタ×4、スレーブ×6のクロスバーの実装この方式でマスタとスレーブのインタフェースの数を増やしていくことができます。ただし一定の数を超えると、SoC全体に全てのデータパスをルーティングするときのサイズが場所と経路の面で現実的ではなくなります。
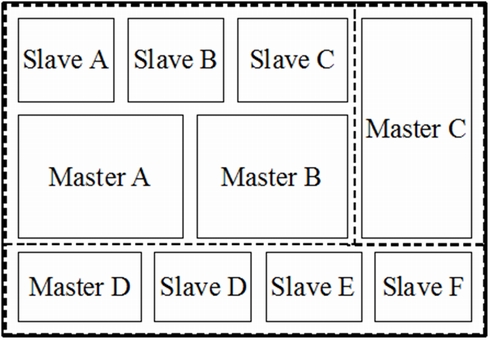 図4:SoCフロアプラン
図4:SoCフロアプランマスタ/スレーブ間インタフェースの数が多い複雑なチップの場合、IPコアグループの配置に従って、複数の物理領域内で個別のインターコネクトを設計する必要があります。領域間をつなぐブリッジがマスタ/スレーブ間に必要な接続を供給します。
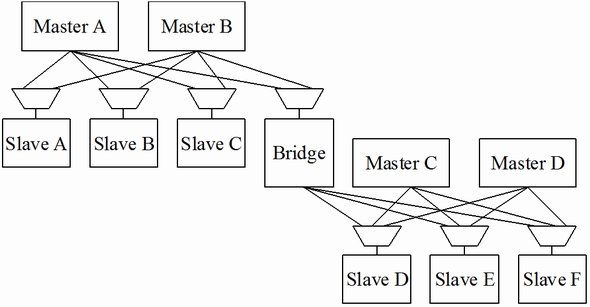 図5:マスタ×4、スレーブ×6のインターコネクト
図5:マスタ×4、スレーブ×6のインターコネクトブリッジがロジック遅延オーバーヘッドをホールドし、データトランザクションに遅延サイクルを追加します。
クロスバーインターコネクトは、同時アクセスが招くシステムアーキテクチャ上の問題を解消するが、マスタとスレーブのIPブロック数が多いチップでは物理的な実装上の問題が生じます。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
コーナーリンク


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。