- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
マシンビジョンシステム設計の手引:カメラ/プロセッサ選択のポイントを解き明かす(3/5 ページ)
・用途に合わせた選択
マシンビジョンシステムにおけるフレームレートと解像度の最適なバランスは、その用途によって大きく異なる。例えば、大きな物体に存在する小さな欠陥を検査する場合や、物体のサイズを正確に計測する場合には、高い解像度が必要である。一方、時間当たりに検査する物体数、または大きな物体をスキャンするのに必要な時間、という意味でのシステムスループットを向上させたい場合は、フレームレートが高くなければならない。
フレームレートと解像度のバランスは、カメラのコストにも影響を及ぼす。範囲指定によりフレームレートを高めるモードを持つカメラは、同じ解像度で低速のカメラよりもコストが高い。また、高い解像度を実現するには、より高コストのセンサーが要求される。言い換えれば、適切なフィールド深度と視界を実現するためには、カメラ内に高コストの光学系が必要となる。さらに、コストのほかに、照度(p.46の別掲記事『照度/照明位置の重要性』を参照)や色(別掲記事『色の表現方法』を参照)などの条件も考慮してカメラを選択しなければならない。
選択するカメラにより、マシンビジョンシステムで達成可能な性能の限界が決まるが、これだけが決定要因というわけではない。画像の処理速度にも限界が存在するし、解像度や、必要な処理の種類、画像プロセッサの性能などいくつかの要因が、この速度に影響を与える。次は、これらのうち、プロセッサの選択について考えてみる。
色の表現方法
色は、照明や視界の環境、スペクトル属性に依存する主観的な値である。カメラは実際に色を見ているわけではない。カメラは総合的なスペクトル情報のレベルを検出しており、それを人間がある光の条件の下で観察すると、ある特定の色に見えるという仕組みだ。従って、色に基づく検査をマシンビジョンシステムで自動化するには、人間の視覚をモデル化する必要がある。
マシンビジョンシステムにおける色は、通常、次の2つのうちいずれかの役割を果たしている。1つは、色分類システムのように、物体を識別/区別するための基準として色を利用するというものである。色分類システムでは、通常はかなり違いのあるさまざまな色を区別するだけなので、照明や画像処理は特に重要というわけではない。例えばクレヨンメーカーであれば、標準的な室内照明の条件下で、簡単な色分類システムを利用することにより、各箱の中に赤いクレヨンが1本だけ入っていることを確認することができる。
マシンビジョンシステムにおける色のもう1つの役割は、色自体を検査することにより、製品が仕様を満たしているかどうかを確認するというものである。上の例と同様にクレヨンメーカーを例にとると、各クレヨン箱に入っている赤いクレヨンがどれも同じ色であることを確認するには、視覚的カラーマッチングシステムが必要だ。カラーマッチングによってのみ、ある2本の赤いクレヨンの色が同一であるかどうかを判断することが可能になる。
カラーマッチング
カラーマッチングシステムは、人間と同じ方法で色を判断しなければならない。その判定方法の1つは、理想に近い色のクレヨンもしくは色見本から成る集合を標準サンプルとして用いる手法である。カラーマッチングシステムは相対的に色を解析することにより、各検査対象物と標準サンプルとの視覚的な色の差異を測定する。
このようなカラーマッチングシステムの精度は、光源のスペクトル属性にある程度依存する。人間の知覚レベルに合った結果を得るには、光源は380nm〜720nmという可視範囲内のすべての波長において十分な放射強度が必要である。
もしシステムの照明が備えるスペクトルに特定波長の高輝度スペクトルが存在すると、光源間メタメリズムという現象が発生する。この光源間メタメリズムとは、2つの物体が、ある光源の下では同一に見え、別の光源の下では異なって見える現象のことである。
この光源間メタメリズムが生じる原因は、人間の視覚系が広い範囲のみを区別し細かい波長情報は認識しないためだ。特定の波長の照度が強くなる場合、人間の目には実際の物体には存在しない色が見えてしまうことがある。細かいスペクトル情報を検出するカメラはほとんど存在しないため、ほとんどのカメラにおいて人間の目と同様に光源間メタメリズムの影響が生じる。
視覚に基づく色の識別
システムにおいて、カラーマッチングを合否判定のみに使用する場合は、システムの色測定方法は何でもよく、どのような色空間を用いてもよい。しかし、色の測定結果を製造工程における補正にフィードバックする用途に用いる場合には、色空間の選択が重要な要素となる。従来のデジタルカメラのRGB(red green blue)のような標準的な色空間では、人間が行う色の知覚については何も考慮されていない。従って、RGB色空間における色の差異の測定結果を、そのまま補正処理に用いることはできない。
人間にとって意味のある色識別を行うには、マシンビジョンシステムにおいても人間の知覚に似た方法で色を表現する色空間を用いる必要がある。CIE 1976 L*a*b*色空間(以下、CIE L*a*b*)はそのような色空間の1つである(図A)。
この規格では、人間の知覚においては物体が同時に赤色と緑色、または黄色と青色に見えることはないという「反対色理論」に基づいている。
CIE L*a*b*では、L*、a*、b*という3つの値を用いて色を表現する。1つ目のL*は明度を表す。2つ目のa*は、赤色と緑色のパラメータ(軸)である。a*の値が正である場合は、物体は赤っぽく見えることを表し、負である場合は緑っぽく見えることになる。3つ目のb*は、黄色と青色のパラメータ(軸)である。これは、b*が正ならば黄色っぽく、負ならば青っぽく見えることを表す。
CIE L*a*b*は人間の知覚に対応している。CIE L*a*b*において差がなければ、人間の知覚においてもその色は等しい。つまり、この表現体系を用いれば、色差の補正を容易に行うことができる。
同様の色空間として、HCL(hue/chroma/ lightness:色相/彩度/明度)を用いる規格がある。色相は、色の赤、緑、青、黄色の度合いを表す。一方、彩度は、人間が鮮明さとして知覚する、灰色からの差異を表す。そして明度は、物体の明暗を表す。明度は、中央に灰色をはさんだ黒から白の範囲で表される。
これら2つの色規格は、互いに1対1に対応しており、CIE L*a*b*値はHCL色空間に一意的に変換可能である。従って、システムで色差を評価して補正する場合には、どちらかの表現体系を用いることで、両方の表現体系に対応することができる。
RGB色空間も人間が知覚する色空間にある程度対応させることが可能だが、完全には対応しない。CIE L*a*b*によって表現される色空間全体を網羅するには、赤(R)、青(B)、緑(G)が負値もとる必要がある。しかし、カメラは正値しか出力することができない。従って、RGB色空間を使用する場合、表現できない色が生じてしまう。
色空間の選択は非常に重要である。さらに、色スペクトル全体を扱うアプリケーションでは、カメラのばらつきや照明環境を校正するためにスペクトル計測装置や色彩計などを用いて色の測定を行う必要もある。
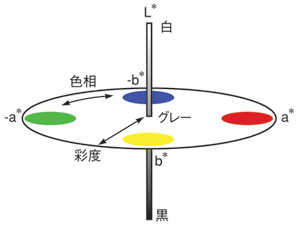 図A CIEL*a*b*の概念図 色を測定し、補正情報を提供するビジョンシステムは、人間が認識する形式で色を表現するCIEL*a*b*などの色空間を用いなければならない(提供:EdmundOptics社)。
図A CIEL*a*b*の概念図 色を測定し、補正情報を提供するビジョンシステムは、人間が認識する形式で色を表現するCIEL*a*b*などの色空間を用いなければならない(提供:EdmundOptics社)。Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
コーナーリンク


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。