- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
モーター制御に不可欠なエンコーダ、その多様な用途:エンコーダの基礎から応用(1)(2/3 ページ)
エンコーダの仕組みとは?
それでは、エンコーダを使ってどのように、「回転方向」、「回転位置」、「回転速度」を知ることができるのでしょうか? 光学透過型エンコーダを例に、概要を解説しましょう。
当社の標準的な光学透過型エンコーダの概略図を図2に示しました。主要な構成部品は、(1)LED発光素子、(2)レンズ、(3)コードホイール(回転スリット円板)、(4)受光ICです。受光ICの部分は各社さまざまな形態がありますが、ここでは当社の標準的な構造で説明しましょう。

まず、(1)の「LED発光素子」からの光は錯乱光であるため、(2)の「レンズ」にて集光して平行光に近づけます。(3)の「コードホイール」には、長方形の穴が開いたスリット部と、穴が開いていない部分が有ります。このスリットは1周にわたり等間隔で穴が開いています。スリットを通った光が、受光IC上のフォトダイオードに伝わり、信号変換回路部で処理されて、最終的には「チャネルA(A相)」、「チャネルB(B相)」という2系統の方形波として出力されます(図3)。
A相とB相の位相関係は世界中のどのメーカーでも共通で、B相はA相から1/4周期ずれて出力されます。このA相、B相という2系統のエンコーダ出力をうまく処理することで、モーターの「回転方向」や「回転位置」、「回転速度」を知ることができるのです。それでは、どのように検出するのか1つ1つ説明しましょう。
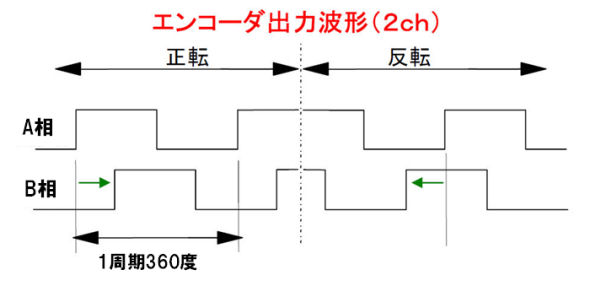 図3 エンコーダの2つの出力波形(「A相」と、1/4周期遅れた「B相」)
図3 エンコーダの2つの出力波形(「A相」と、1/4周期遅れた「B相」)回転方向の検出
A相とB相のどちらが先に立ち上がるかを検出することで、回転円板(コードホイール)を取り付けた回転軸の回転方向を判別できます。例えば、エンコーダの回転円板(コードホイール)が正転(時計方向)へ回転している時、A相よりもB相が遅れて立ち上がるとします。このとき、回転ディスクが反転(反時計方向)へ逆回転すると、物理的な回転円板の回転方向が反転するだけなので、今度はB相がA相よりも先に立ち上がります(図3)。またこのような仕組みは、回転方向だけではなく、水平(リニア)駆動時の移動方向の判別にも使えます。
回転位置の検出
回転円板(コードホイール)には物理的に光を遮る/透過するスリットが1周期にわたり、等間隔で設けられています。ここでは例として、1周期に360個のスリットが設けられているとします。1つのスリット当たり1つのパルスが出力されますので、1パルス当たり1度の回転位置が検出できることになります。1周期に3600個のスリットを設けた回転円板(コードホイール)にして、同じように検出すれば、0.1度の角度が検出できます。
さらに、A相とB相の2つの出力信号を使用すると、4倍の角度分解能を実現できます。これは、A相とB相のそれぞれの波形の立ち上がり/立ち下がり位置をカウントすることで、物理的に設けたスリット数よりも細かい角度位置を検出できるからです。また、これらの応用例として回転軸に50歯のギアが付いている場合、回転円板(コードホイール)に50個のスリットがあれば、1歯ずつ制御することができます。
回転速度の検出
エンコーダから出力される1周期のパルス時間と1周期当たりの出力パルス数を測定することで、下記の式を使って容易に算出できます。
回転速度(r/min)=(1/(1周期の時間×パルス数))×60
以上のような動作をするエンコーダをうまく使うことで、モーターの回転方向や回転位置、回転速度を制御することができます。前述のエレベータの例ですと、図4のようにマイクロプロセッサからの制御信号に基いてモーターを駆動すると、回転したモーター軸に付いているコードホイール/エンコーダから信号が出力されます。その後、エンコーダの出力をエンコーダカウンタで処理して、マイクロプロセッサの制御信号と差動比較をしています。モーターを動かすための制御信号とモーター回転の結果を比較することで、狙った回転数に必要な電力だけがモーターに供給されるという仕組みです。このように閉ざされた構成の中で比較演算する形態のことを、「クローズドフィードバックループ」もしくは「クローズドループ」と呼びます。

Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 20年と短命だった「PowerPC」、旧Freescaleが粘るもArmに勝てず
- カメラなしで見守り可能 アンテナ一体型ミリ波レーダー
- 複数AI機能をFPGAに集約 マイクロチップ製品向け開発キット
- Infineon、宇宙向けに耐放射線GaNゲートドライバー
- 組み込みで命運つなぐも限界 市場から消えたNEC「Vシリーズ」
- ファミコンにも採用された「MOS 6502」、その末路をたどる
- 30年前に関わった半導体用温調器、調査で判明した設計の盲点
- 専用ICなしで高精度バッテリー測定 PMIC向け管理システム
- 次世代車載向けセキュリティコントローラー
- 産業向けデジタルアイソレーターに新構成、東芝D&S
コーナーリンク


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。