- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
「ステッピングモーター」で学ぶエンコーダの活用法:エンコーダの基礎から応用(最終回)(1/3 ページ)
エンコーダを使えば、送った制御信号の通りにモーターが回転しているかどうかはもちろん、モーターの負荷の状態も確認できます。「ステッピングモーター」を事例に、エンコーダを使った具体的な回路例を解説します。
本連載では、回転したり水平移動したりするさまざまな機器/装置の移動方向や移動量、角度を検出する「エンコーダ」を取り上げ、動作原理や特徴、多様なアプリケーションなどを紹介してきました。第1回では、エンコーダの役割や用途、基本的な動作原理を解説しました。エンコーダには動作原理が異なる幾つものタイプが存在しますが、大きく「光学式」と「磁気/電気誘導式」に分けられます。そこで第2回では、光学式エンコーダの性質(長所と短所)や得意な用途を紹介し、第3回では磁気/電気誘導式エンコーダに焦点を当てました。最終回となる今回(第4回)は、「ステッピングモーター」を事例に、エンコーダの具体的な活用法を解説しましょう。
なぜエンコーダを使うのか?
ステッピングモーターは、別名パルスモーターと呼ばれており、パルス電流をモーターに供給して回転速度や回転方向を制御します。一般的なステッピングモーターでは、1パルス当たり1.8度、もしくは1パルス当たり0.72度回転しますので、200パルスもしくは500パルス供給すると1回転することになります。従って通常は、回転速度や回転方向を検出するエンコーダのようなセンサーを使わずとも、モーターをコントロールできます。それなのになぜ、エンコーダを組み合わせて使うのでしょうか。
エンコーダを使うメリットを考える前に、まずステッピングモーターの構造や動作方式を少し説明しましょう。ステッピングモーターには、「VR型」、「PM型」、「HB型」という3種類があります。
- VR型=可変リアクタンス型(ケイ素鋼板と巻き線で構成された、磁石を使用しないモーター) 微少な回転角度を実現でき、薄型の構造を採れるが、回転トルクが他のタイプより小さい。
- PM型=永久磁石型(永久磁石と巻き線で構成されたモーター) 薄型にできるものの、微少な回転角度の制御は困難。構造が他のタイプよりもシンプルにできる。
- HB型=ハイブリッド型(VR型とPM型を組み合わせたモーター) 構造が複雑で、薄型化も困難になる。しかし、回転トルクが他のタイプよりも高められ、微少な角度制御も実現できる。
それぞれに回転角度の微少な制御の難しさや構造、回転トルクに違いがあり、採用されるアプリケーションも異なります。ただ、ステッピングモーターを動かす基本原理はどの種類も同じで、パルスタイミングに応じて各巻き線に流す電流を調整することで、回転を制御します。上に挙げた3種類の中で工業用として広く使用され、エンコーダの採用例も多いHB型(ハイブリッド型)の動作方式を詳しく説明しましょう。
モーターの回転状態をエンコーダで把握
HB型ステッピングモーターは、図1のように、ローター(モーター軸)に永久磁石と歯車状のケイ素鋼板があり、ステーター(モータケース側)に巻き線が配置されています。説明を分かりやすくするために、モーターの断面図である図2を使って説明します。このモーターには4つの巻き線がありますが、「A−A′」と「B−B′」の巻き線は接続されており、かつ巻き方は逆になっています。
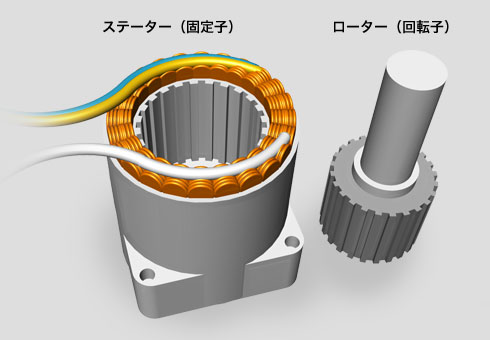 図1 HB型ステッピングモーターの構造
図1 HB型ステッピングモーターの構造まず、ステーターの巻き線であるA-A′に電流を流しますと、AとA′それぞれに極性の違う磁極が発生しますので、ローター側の突起部分(歯)と引き合います。次にB-B′に電流を流すと、ローターに付いている永久磁石の磁極の影響によって時計方向に回転し、次の突起部分(歯)と引き合います。このように、ステーター側巻き線に供給する電流を次々と切り替えて、モーターが回転します。1(パルス)回の切り替えで1(ステップ)歯ずつ動きますので、ステップモーター(ステッピングモーター)と呼ばれています。そのため、ローターに付いている歯が200歯だとしますと、200パルス入力すると1回転(360度)回転します。100パルスだと180度、1パルスだと360/200=1.8度回転しますので、簡単に回転角度を制御できるのです。
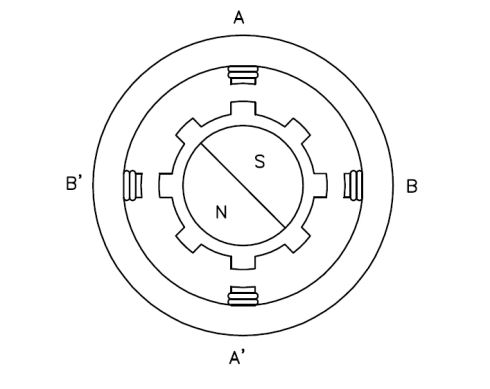 図2 ステッピングモーターの断面図
図2 ステッピングモーターの断面図ここまでで、ステッピングモーターの構成と動作方式の概略は分かったと思いますが、パルス制御で簡単に動作制御できるステッピングモーターにも弱点があります。ステッピングモーターは、入力パルスに従ってモーターが回転するのですが、何らかの事情でパルスを送ったのに回転しなかったり、回転し過ぎたりしてしまうと回転角度を制御できなくなってしまいます。このような現象を「脱調」と呼びます。通常は脱調が発生しないようにモーターの巻き線には最大電流をいつも流しておき、強力な磁力を作り出しています。ただし、モーターを回転させていないときや軽い負荷の場合でも最大電流を流しているため、効率が悪くなってしまうのです。これが、ステッピングモーターの弱点です。もし機会があれば、エンコーダを使用していないステッピングモーターの通電状態の表面を触ってみてください。予想以上に熱いことに驚くはずです。
ここで活躍するのがエンコーダです。エンコーダを使うと、送ったパルス通りに回転しているかどうかを、エンコーダ出力で確認できます。このため、巻き線に最大電流を流し続ける必要がなくなります。図3のような構成を採ることで、フィードバック制御が可能になり、モーターが停止しているときに外部の力で回転してしまっても、元の状態に戻すことができます。
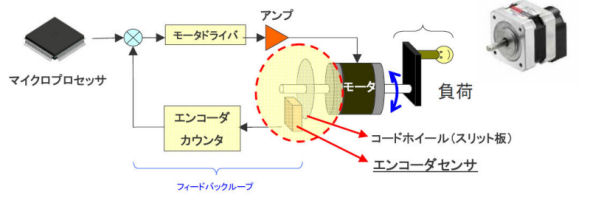 図3 エンコーダを使ってモーターを制御するシステム例
図3 エンコーダを使ってモーターを制御するシステム例エンコーダを使うメリットはこれだけではありません。エンコーダを採用することで可能になったことがあります。それは、負荷状態の把握です。回転動作中に送ったパルスと、エンコーダからのパルスを比較演算しながら動作を監視することで、モーターにかかっている負荷を知ることができます。
例えば、モーターの回転動作中に負荷が変化することで脱調したとすると、脱調によってずれたパルス数から判断して、電流を数%〜10数%増やします。このような仕組みを採ることで、モーターに加わっているその時々の負荷に応じた電流を流すことができます。この結果、モーターを使用している装置全体の消費電流を抑えることにつながりますので、コスト削減や低消費電力化が注目されている現在の市場状況では、顧客に対して特に大きなアピールポイントになるはずです。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング
- 20年と短命だった「PowerPC」、旧Freescaleが粘るもArmに勝てず
- カメラなしで見守り可能 アンテナ一体型ミリ波レーダー
- 複数AI機能をFPGAに集約 マイクロチップ製品向け開発キット
- Infineon、宇宙向けに耐放射線GaNゲートドライバー
- 組み込みで命運つなぐも限界 市場から消えたNEC「Vシリーズ」
- ファミコンにも採用された「MOS 6502」、その末路をたどる
- 30年前に関わった半導体用温調器、調査で判明した設計の盲点
- 専用ICなしで高精度バッテリー測定 PMIC向け管理システム
- 次世代車載向けセキュリティコントローラー
- 産業向けデジタルアイソレーターに新構成、東芝D&S
コーナーリンク


![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。