- プロセスエンジニアの現場から
- マイクロプロセッサ懐古録
- 中堅技術者に贈る電子部品“徹底”活用講座
- たった2つの式で始めるDC/DCコンバーターの設計
- DC-DCコンバーター活用講座
- Wired, Weird
- マイコン講座
- Q&Aで学ぶマイコン講座
- 高速シリアル伝送技術講座
- 記録計/データロガーの基礎知識
- アナログ設計のきほん/ADCとノイズ編
- めざせ高効率! モーター駆動入門講座
- Bluetooth mesh入門
- 「SPICEの仕組みとその活用設計」最新記事一覧
- 計測器メーカーから見た5G
- USB Type-Cの登場で評価試験はどう変わる?
- IoT時代の無線規格を知る【Thread編】
- IoT時代の無線規格を知る【Z-Wave編】
Bluetooth位置情報サービスの種類と市場を知ろう:Bluetooth位置情報サービスの基礎知識(前編)(2/2 ページ)
【測位システム】
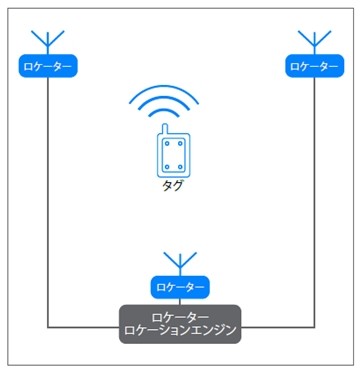
リアルタイム位置情報システム(RTLS)
RTLSソリューションには、Bluetoothの受信機が用いられます。この受信機はロケーター(Locator)とも呼ばれ、施設内の決められた位置に配置されます。ロケーターは、ロケーションエンジンとも呼ばれる集中管理サーバに接続されています。三辺測量は、基準となる3点から対象までの距離をもとに対象の位置を特定します。
Bluetoothの場合、ロケーターが、タグからの受信信号強度を基にしてタグまでの距離を推定します。位置をどれくらい正確に推定できるかは、施設のフロア構造や、ロケーターの配置数など複数の要因によって左右されます。
 RSSIと三辺測量を活用したBluetoothの資産追跡システム
RSSIと三辺測量を活用したBluetoothの資産追跡システム屋内測位システム(IPS: Indoor Positioning System)
BluetoothのIPSは、ショッピングモールの買い物客や空港の利用者、巨大なオフィスビルの従業員などに対して施設内の道案内を行うためのシステムです。IPSソリューションでは、RTLSとは逆の仕組みが使われています。
Bluetoothの受信機/発信機の代わりに、「ロケータービーコン」と呼ばれるものが施設内の特定の場所に配置されます。訪問者(ユーザー)は、スマートフォンのアプリとBluetooth通信を使ってロケータービーコンを探知します。アプリは、「どのビーコンを探知したのか」「探知したビーコンの位置と受信信号強度(RSSI)」という2つの情報から、RTLSソリューションと同様に三辺測量によって現在位置を算出します。
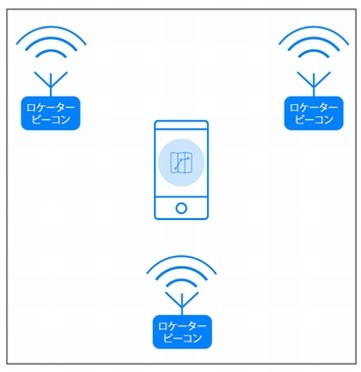 RSSIと三辺測量を活用したBluetoothのIPSシステム
RSSIと三辺測量を活用したBluetoothのIPSシステムより高精度な位置情報サービスを実現するには?
既存のビーコンよりも正確な位置情報データを必要とするケースや、対象物の方向を特定することが必要なケース、あるいはその両方が必要なケースは多々あります。
しかし、その要件を満たせる無線を活用した方向検知機能は、これまでありませんでした。
無線による方向検知とは、“信号の発信方向を特定する方法”を指します。無線による方向検知の歴史は20世紀初頭にまでさかのぼり、航空や航海、野生動物の追跡といった分野で活用されてきました。
Bluetoothコア仕様バージョン5.1(Bluetooth 5.1)では、方向検知機能がオプションで追加されています。この新機能を使うことで、Bluetoothデバイスは他のBluetoothデバイスから発信された信号の方向が分かるようになります。一見すると基本機能のようにも思えるこの技術は、Bluetoothの位置情報サービスソリューションを大きく飛躍させる可能性を秘めています。
上で述べたように、現在Bluetoothの位置情報サービスは、RSSIによって2台のデバイス間の距離を推定しています。RTLSとIPSソリューションでは、この推定距離と三辺測量を用いてデバイスの位置を特定します。2019年に追加された方向検知機能によって、このデバイスから見た他のデバイスの方向も分かるようになり、三辺測量を用いることでRTLSとIPSソリューションでは位置情報の精度がさらに向上します。
簡単に紹介すると、Bluetoothの方向検知機能は、受信角度(AoA:Angle of Arrival)と放射角度(AoD:Angle of Departure)という2種類の方法でBluetooth信号の方向を特定します。AoAとAoDはいずれもアレイアンテナを必要とするものです。AoAとAoDの仕組みと現在の活用状況については、後編で解説していきます。
(後編に続く)
関連記事
 Bluetooth meshネットワークの基本概念(前編)
Bluetooth meshネットワークの基本概念(前編)
今回の連載では、Bluetooth meshを正しく理解するための基礎講座として、このネットワークトポロジーを支える基本的な概念をはじめ、デバイスの管理やセキュリティについて、4回にわたり解説していきます。 Bluetooth meshネットワークの基本概念(後編)
Bluetooth meshネットワークの基本概念(後編)
Bluetooth meshを正しく理解するための基礎講座。第2回となる今回は、Bluetooth meshのノード間のデータ転送で使われる「メッセージ」や、そのメッセージで使われる「アドレス」について解説します。 Bluetooth 5 通信距離「従来比4倍」の仕組み
Bluetooth 5 通信距離「従来比4倍」の仕組み
Bluetooth 5の特長について解説するシリーズの第2回。今回は、Bluetooth 4.2に比べて4倍という通信距離を実現できる仕組みについて解説します。 主要メッシュネットワークに対応したモジュール
主要メッシュネットワークに対応したモジュール
シリコン・ラボラトリーズは、主要メッシュネットワークに対応した「MGM210x」「BGM210x Series 2」モジュールを発表した。スマートLED照明、ホームオートメーション、工業用IoT向けのワイヤレスソリューションの開発を支援する。
Copyright © ITmedia, Inc. All Rights Reserved.
記事ランキング




![]() ITmediaはアイティメディア株式会社の登録商標です。
ITmediaはアイティメディア株式会社の登録商標です。